偏った円周マーカによる絶対姿勢推定を用いた球体ダイナミックプロジェクションマッピング
- Uniform Circumferential Markers (UCM, 一様な円周マーカ)は,名前の通り一様な分布のため,絶対姿勢の取得が不可能である。絶対姿勢を取得するには,マーカを非一様な分布にする等により,何らかの符号情報を埋め込む必要がある.従来手法では,QRコードのような角形の複雑な形状や,高密度な点群の分布により符号化を行っていたが,これらはボケや遮蔽に弱い問題があった.
- そこで本研究では,Biased Circumferential Markers (BCM, 偏りのある円周マーカ)を提案する(図1).各マーカの内側円はUCMと同じ分布である一方で,外側円の大きさや,内側円に対する偏りを多様にすることで,符号化を実現している. UCMと同様に大きな円を活かした形状であるためボケに強く,またUCMと同様の画像計測アルゴリズムにより途切れた円周も利用できるため,遮蔽にも強い.これにより,UCMでのトラッキング性能を保持しつつ,球体の絶対姿勢の高速・高精度な推定を実現する.
- 本マーカは,広域・ロバストな球体へのダイナミックプロジェクションマッピングに有用であることはもちろんだが,円の形状を用いたボケ・遮蔽に強いマーカという,新たな符号化マーカの可能性を示しているともいえる.
- 球体の絶対姿勢が分かることにより,遮蔽復帰後に投影がずれない,遮蔽の前後の回転情報が正確なため,遮蔽中の運動情報が推定しやすい,等の応用が考えられる.将来的には,多数個のプロジェクタを用いて,継ぎ目のない全周囲投影の実現に利用可能と考えられる.
 |
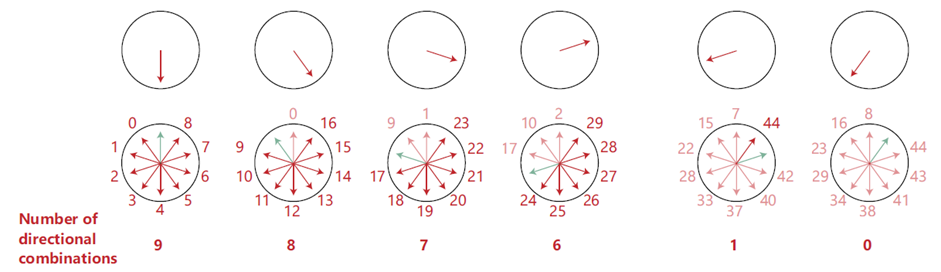 |
| 図1 球体上に配置されたBiased Circumeferential Markers (BCM, 偏りのある円周マーカ) の様子. | 図2 隣り合ったマーカの外側円の偏らせる方向の組み合わせ. |
参考文献
- Yuri Mikawa, Tomohiro Sueishi, Yoshihiro Watanabe, and Masatoshi Ishikawa: Dynamic Projection Mapping for Robust Sphere Posture Tracking Using Uniform/Biased Circumferential Markers, IEEE Transactions on Visualization and Computer Graphics, vol. 28, no. 12, pp. 4016-4031, 1 Dec. 2022, doi: 10.1109/TVCG.2021.3111085.
- Yuri Mikawa, Tomohiro Sueishi, Yoshihiro Watanabe, and Masatoshi Ishikawa: Dynamic Projection Mapping for Robust Sphere Posture Tracking Using Uniform/Biased Circumferential Markers, IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Virtual (Christchurch, New Zealand), 16th, Mar. 2022. [invited][Presentation video]
- Yuri Mikawa : Dynamic Projection Mapping for Robust Sphere Posture Tracking Using Uniform/Biased Circumferential Markers, TVCG Session in ACM SIGGRAPH Asia 2022, Daegu, South Korea, 8th, Dec. 2022.