広域・高速トラッキングのための多色LEDマーカ
- 近年の拡張現実ディスプレイ(Augmented Reality display; AR display)は、スポーツやステージパフォーマンスでの利用のため、高速・広域トラッキングが求められる. 精度と速度を両立するために、トラッキングマーカを対象に貼付することが殆どである. また、対象が広域運動するため、カメラで捉えた際に画像にボケが生じる、および画像の低解像度性の問題が避けられない。著者の提案した円周マーカはそれらを両立するものだが、対象物体が球体に限定される問題がある.また、円周マーカは比較的密なマーカであり、ケージ等の疎な対象物体には適用できない.
- そこで本研究は、図1(a)に示すような、高速・広域トラッキングを疎なマーカ配置で達成する、多色のLEDマーカを提案する。物体表面で三角形メッシュを成すようにマーカを配置し、4個の三角形を成す6頂点のマーカ群から一意なIDを認識して姿勢の初期特定を可能とする. これらのアルゴリズムは、図1(b)に示すWatanabeらの先行研究を参考にした [1]. 通常画像処理での色検出は、照明環境に左右され安定しないが、LEDによる発光は安定的であり、数ピクセルで各マーカの色が容易に抽出できるのが特徴である. LEDは常に明るいため、カメラの露光時間を下げる、あるいは絞りを絞ることで、明るいLEDの箇所のみが撮影可能である. 電力使用が前提となるが、LEDは比較的低電力であり、物体の内側に電池を組み込む等の工夫で容易に製作でき、本マーカによるメリットが上回ると考えられる。
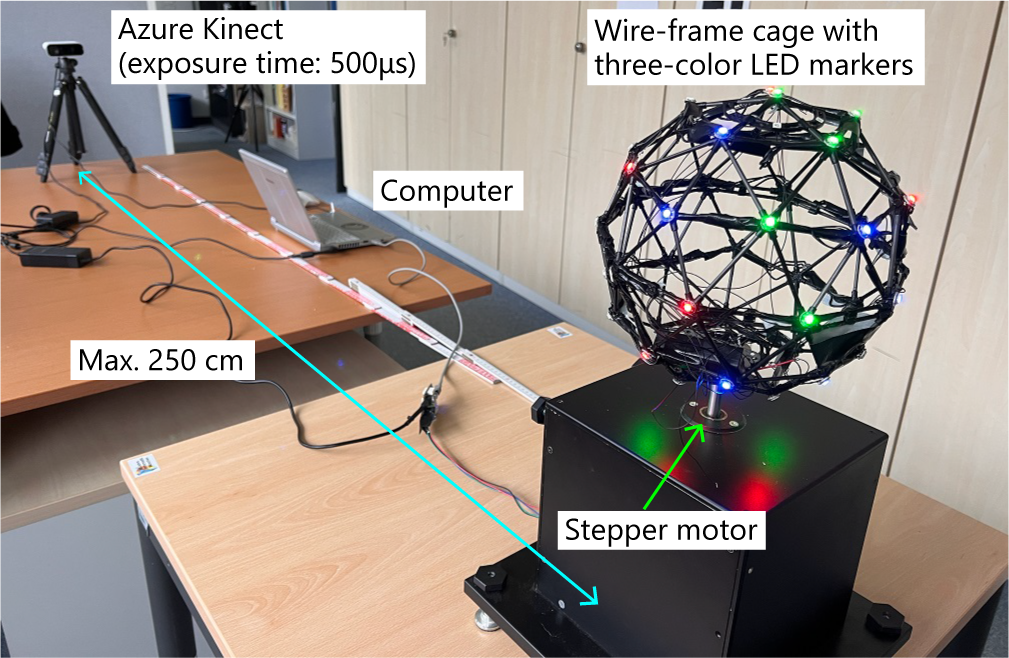
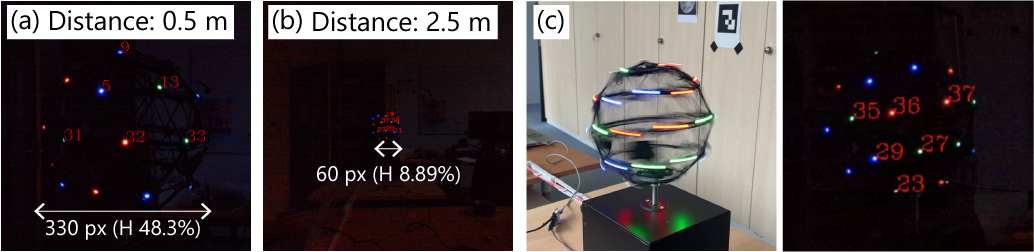
- 本マーカの姿勢特定の評価を、図2に示すシステムを用いて行った. LEDマーカは球型ケージに貼付し、一意な特定を可能とするLEDの色の数を探索し、結果として3色(赤・青・緑)を用いた。図3(a),(b)に示すように、カメラからケージまでの距離が0.5-2.0mの場合にトラッキングできることが分かったが、実験に使用したカメラのFOV(Field-of-View) が大きかったため、より小さなFOVに変換して考えると、FOV=10°で3-13mの範囲でもトラッキング出来ることが分かった。図3(c)に示すように、300rpmの高速な回転時も、露光時間を十分に下げたカメラを用いたことにより、同様にトラッキング可能であることがわかった.
 |
|
| 図1 (a) 本提案の多色LEDマーカ. (b) 本研究のアルゴリズム構成の参考にした, WatanabeらによるExtended Dot Cluster Markerの例. [1] | 図2 評価実験に用いたシステム. |
 |
|
| 図3 (a) カメラ-対象間の距離が0.5mの際の、トラッキングカメラでの撮影画像. (b) 2.5 mの場合の画像. (c) 300 rpmでの回転時の, iPhone 13 Pro、およびトラッキングカメラでの撮影画像. | |
参考文献
- Yuri Mikawa, Christian Eichhorn, and Gudrun Klinker: Multi-color LED Marker for Dynamic Target Tracking in Wide Area, 2023 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), Shanghai, China, 25-29 Mar. 2023.
[1] Y. Watanabe, T. Kato and M. ishikawa, "Extended Dot Cluster Marker for High-speed 3D Tracking in Dynamic Projection Mapping," 2017 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Nantes, France, 2017, pp. 52-61.