動的プロジェクションマッピングに向けた輪郭情報に基づく高速球体トラッキング
- これまでに,背景に再帰性反射材シートを張るのみで,何らの貼付もなく球体を高速トラッキング・投影を行うシステムが提案された.しかし,従来のシルエットの面積に基づくトラッキングアルゴリズムでは,人の手で球体を把持するとき等,インタラクティブな場面におけるノイズによる影響が避けられない問題があった.そこで本研究では,シルエット画像の輪郭点群に基づき,RANSACの手法を用いたロバストな球体トラッキングアルゴリズムを提案した.評価実験により,従来手法と比較してノイズに頑健であることが示され,キャッチボールのようなデモンストレーションも実現された.
 |
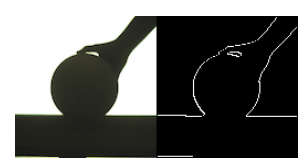 |
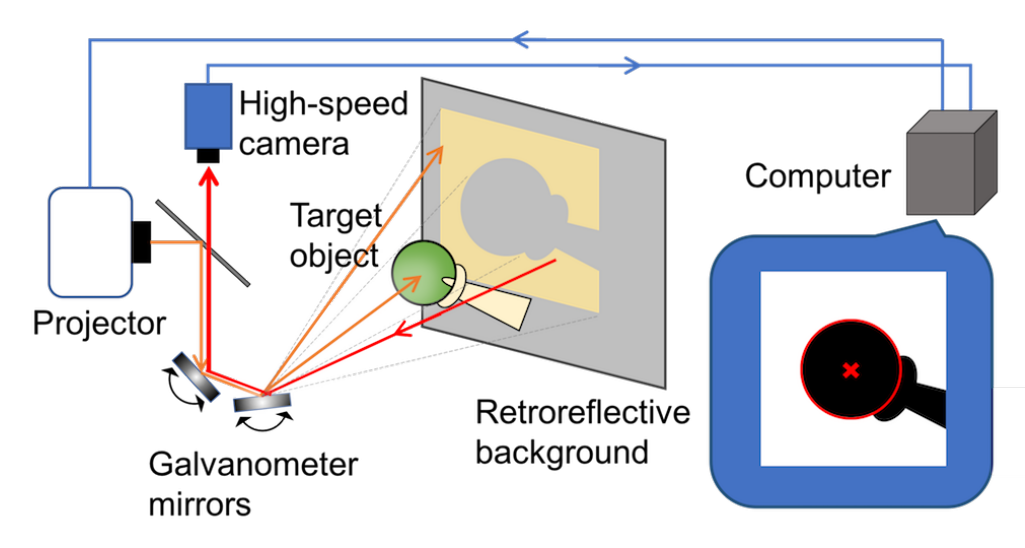
| 図1 本研究の用いるトラッキング・投影システムの概要図. | 図2 本システムの捉える実画像,および画像処理により検出された輪郭画像の例. |
 |
|
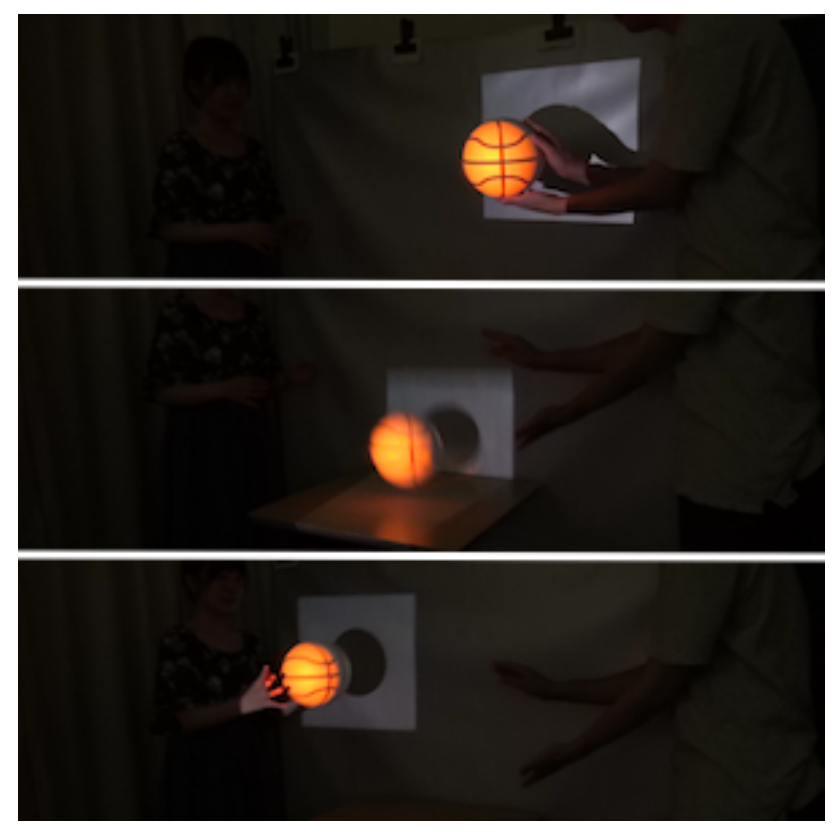
| 図3 バスケットボールの画像を投影し、キャッチボールを行う様子. | |
参考文献
- 三河祐梨, 末石智大, 石川正俊: 動的プロジェクションマッピングに向けた輪郭情報に基づく高速球体トラッキング, 第22回日本バーチャルリアリティ学会大会 (VRSJ2017) (徳島, 2017.9.27)/論文集, 1E4-03.