Multi-color LED markers for high-speed tracking in a wide area
- Recent augmented reality displays require high-speed and wide-area tracking for use in sports and stage performances. In order to achieve both accuracy and speed, tracking markers are almost always attached to the target. In addition, since the object is moving over a wide area, blurred images and low-resolution images are inevitable when captured by a camera. The circumferential marker proposed by the author can solve these problems, but it has the problem that the target object is limited to a sphere. In addition, the circumferential marker is a relatively dense marker and cannot be applied to sparse objects such as cages.
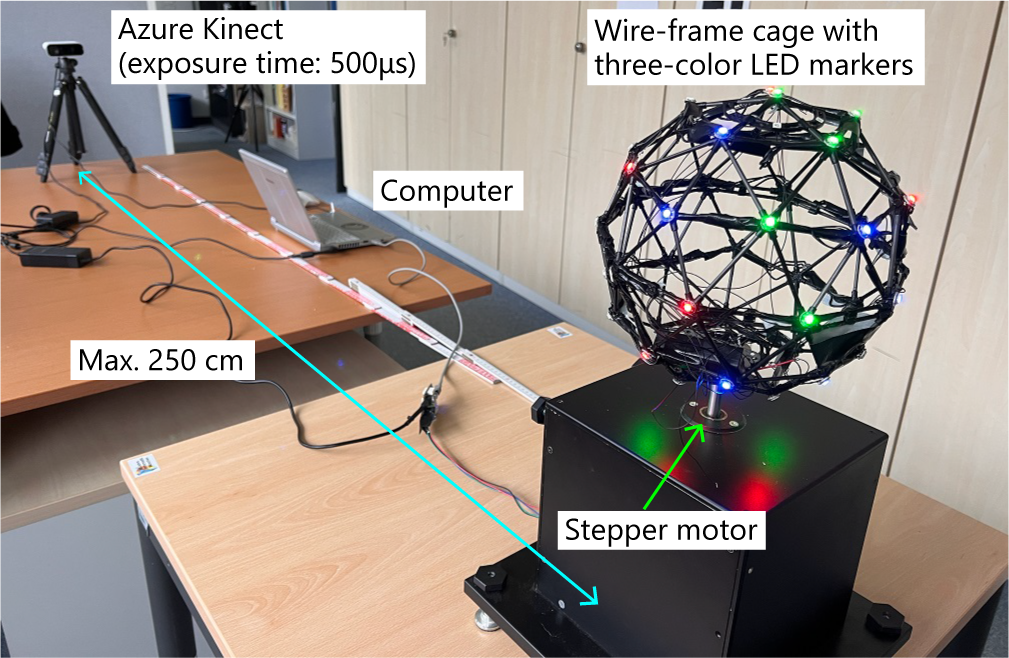
- Therefore, we propose a multi-colored LED marker as shown in Figure 1(a), which achieves high-speed and wide-area tracking with a sparse marker arrangement. The markers are arranged to form a triangular mesh on the surface of the object, and a unique ID is recognized from a set of 6-vertex markers that form 4 triangles to enable initial posture identification. These algorithms are based on the previous work by Watanabe et al., as shown in Figure 1(b) [1]. Color detection in image processing is usually unstable due to the lighting environment, but LED luminescence is stable and the color of each marker can be easily extracted in a few pixels. Since LEDs are always bright, only the brightest LEDs can be captured by reducing the camera's exposure time or by stopping down the aperture. Although the use of electricity is a prerequisite, LEDs are relatively low-power and can be easily produced by incorporating a battery inside the object, etc. The advantages of this marker are considered to outweigh the disadvantages.
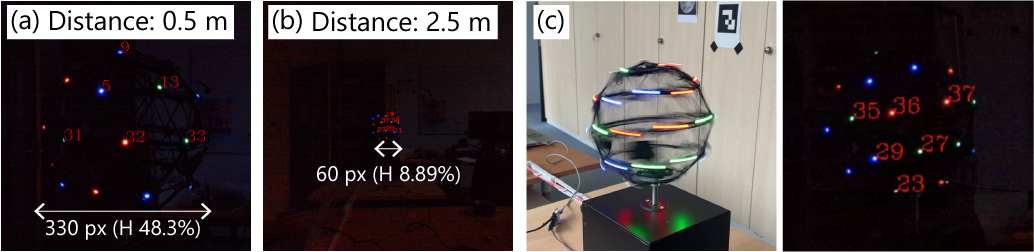
- The posture-specific evaluation of this marker was conducted using the system shown in Figure 2. The LED marker was affixed to a spherical cage, and the number of LED colors that could uniquely identify the marker was explored, resulting in three colors (red, blue, and green). As shown in Figure. 3 (a) and (b), we found that tracking was possible when the distance from the camera to the cage was 0.5-2.0 m. However, since the FOV (Field-of-View) of the camera used in the experiment was large, we converted the FOV to a smaller FOV and found that tracking was possible in the range of 3-13 m with FOV=10°. The FOV (Field-of-View) of the camera used was large. As shown in Figure 3(c), it was found to be possible to track at high rotation speeds of 300 rpm as well, by using a camera with a sufficiently low exposure time.
 |
|
| Fig.1 Uniform circumferential markers (UCM) arranged on a sphere. | Fig.2 Schematic diagram of a 500 fps projection mapping system for a widely moving sphere with circumferential markers. |
 |
|
| Fig.3 (a) Playing catch with random occlusion by hands. (b) Real-time rotational expression using an arrow. (c) Texture projection whose speed is lower than that of the sphere itself, by which users can understand both texture and the sphere's speed. | |
References
- Yuri Mikawa, Christian Eichhorn, and Gudrun Klinker: Multi-color LED Marker for Dynamic Target Tracking in Wide Area, 2023 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), Shanghai, China, 25-29 Mar. 2023.
[1] Y. Watanabe, T. Kato and M. ishikawa, "Extended Dot Cluster Marker for High-speed 3D Tracking in Dynamic Projection Mapping," 2017 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Nantes, France, 2017, pp. 52-61.