High-speed Sphere Tracking based on Contours for Dynamic Projection Mapping
- We have proposed a system for fast tracking and projection of a sphere without any kind of attachment, simply by stretching a retroreflective sheet on the background. However, the conventional tracking algorithm based on the area of the silhouette has a problem of being affected by noise in interactive situations such as when a person grasps the sphere with his/her hands. In this study, we proposed a robust sphere tracking algorithm based on the contour points of the silhouette image, using the RANSAC method. Evaluation experiments show that the proposed algorithm is more robust to noise than conventional methods, and it can also be used for demonstrations such as catching a ball.
 |
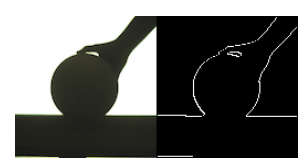 |
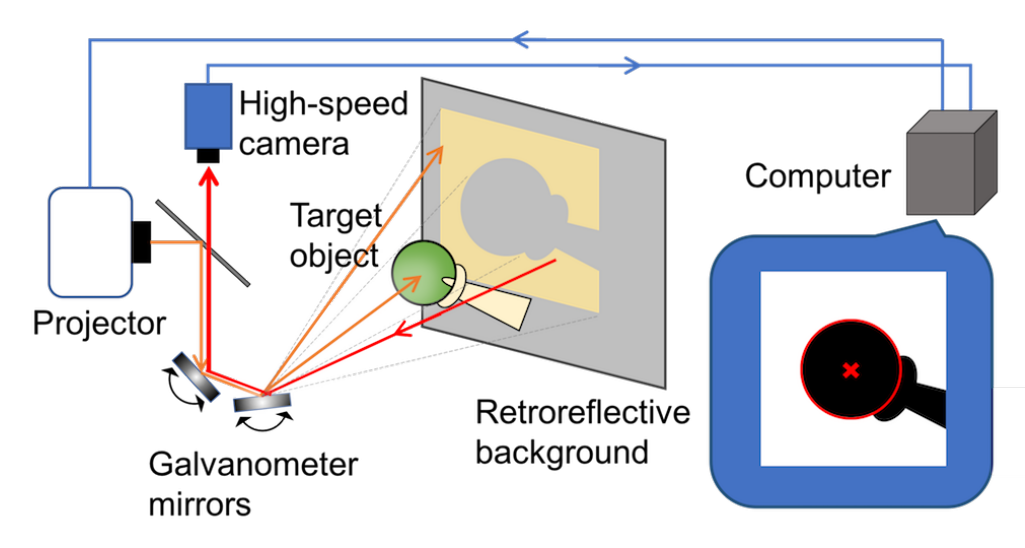
| Fig. 1: Schematic diagram of the tracking and projection system used in this study.. | Fig. 2: Examples of real images captured by this system and contour images detected by image processing.. |
 |
|
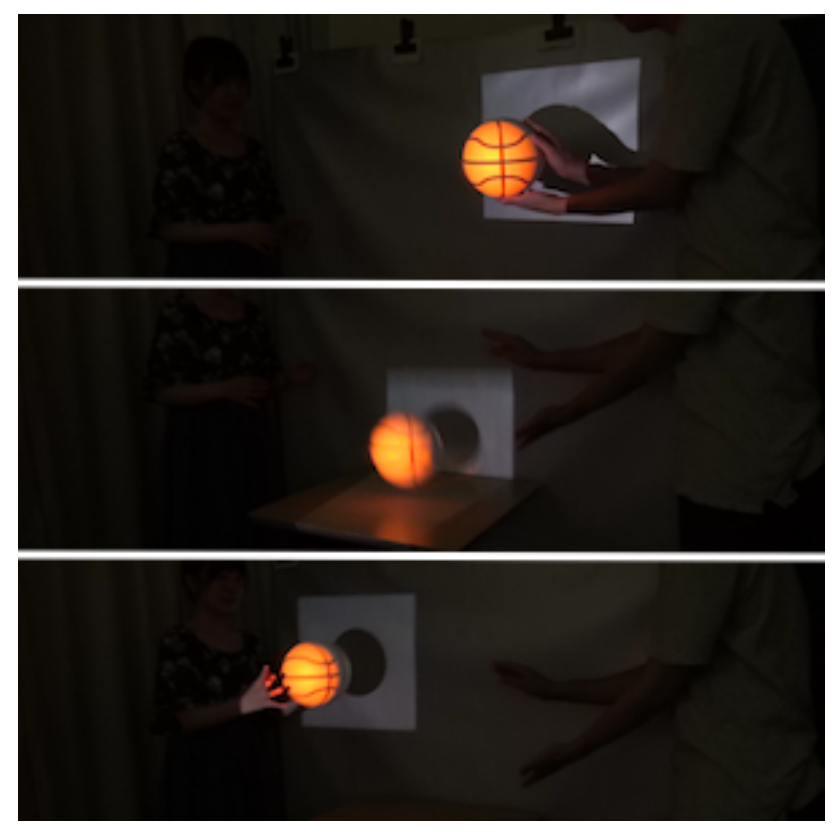
| Fig. 3: The appearance of projecting an image of a basketball and playing catch. | |