VarioLight 2: Dynamic Projection Mapping for a Sports Sphere using Circumferential Markers
- In conventional high-speed projection mapping, a dot marker has been used to recognize the object's posture. However, it is often necessary to manually start tracking because a single dot marker has no geometric information. A cluster marker that combines multiple dots has a feature of automatic tracking start, but can suffer from problems of low resolution and blur. Such dot markers are not robust against random occlusion by hands or legs because the number of measurement points in an image can often be limited. Due to these problems, a widely projection mapping system corresponding to the object's posture (VarioLight) is inconvenient in practical situations such as sports.
- Our laboratory has newly developed "circumferential markers" as tracking markers, focusing spheres that are actively used in sports (Fig. 1). To distinguish them from the version 2 described below, we call them uniform circumferential markers (UCM). The circle is observed as an ellipse in the perspective projection of the camera, and its shape includes geometric information of the sphere (marker position on the sphere from its inclination and collapse condition, and depth position of the sphere from its size). This marker has notable features of automatic tracking start, strong against low resolution and blurring, and a wide projection range in the depth direction. In addition, due to the large number of measurement points on the circumference, it is strong against random occlusion by hands and feet. With the 500 fps projection mapping system shown in Fig. 2, rotation-oriented projection for the sphere with circumferential markers is realized. Note that due to the uniformity of the markers, only relative posture can be measured with UCM.
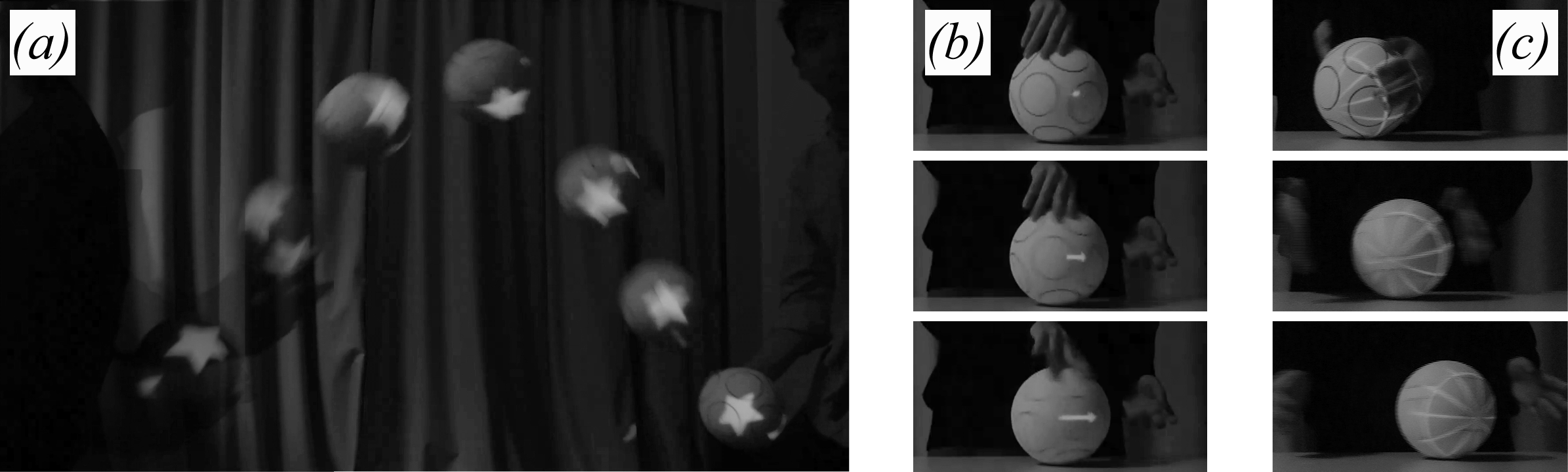
- By using this marker, as shown in Fig. 3(a), it is possible to project onto a playing ball among multiple people which has random occlusion by hands. Moreover, as shown in Fig. 3(b), thanks to circumferential makrers, rotation information is measured with high spatiotemporal resolution and can be projected immediately, and then real-time rotational visualization is realized. As shown in Fig. 3(c), texture projection whose speed is lower than that of the sphere itself, by which users can understand both texture and the sphere's speed, is also realized. This projection system is useful in sports such as soccer, volleyball, and tabletennis. It is expected to be used for sports practice by rotational visualization and wide-area entertainment using balls.
 |
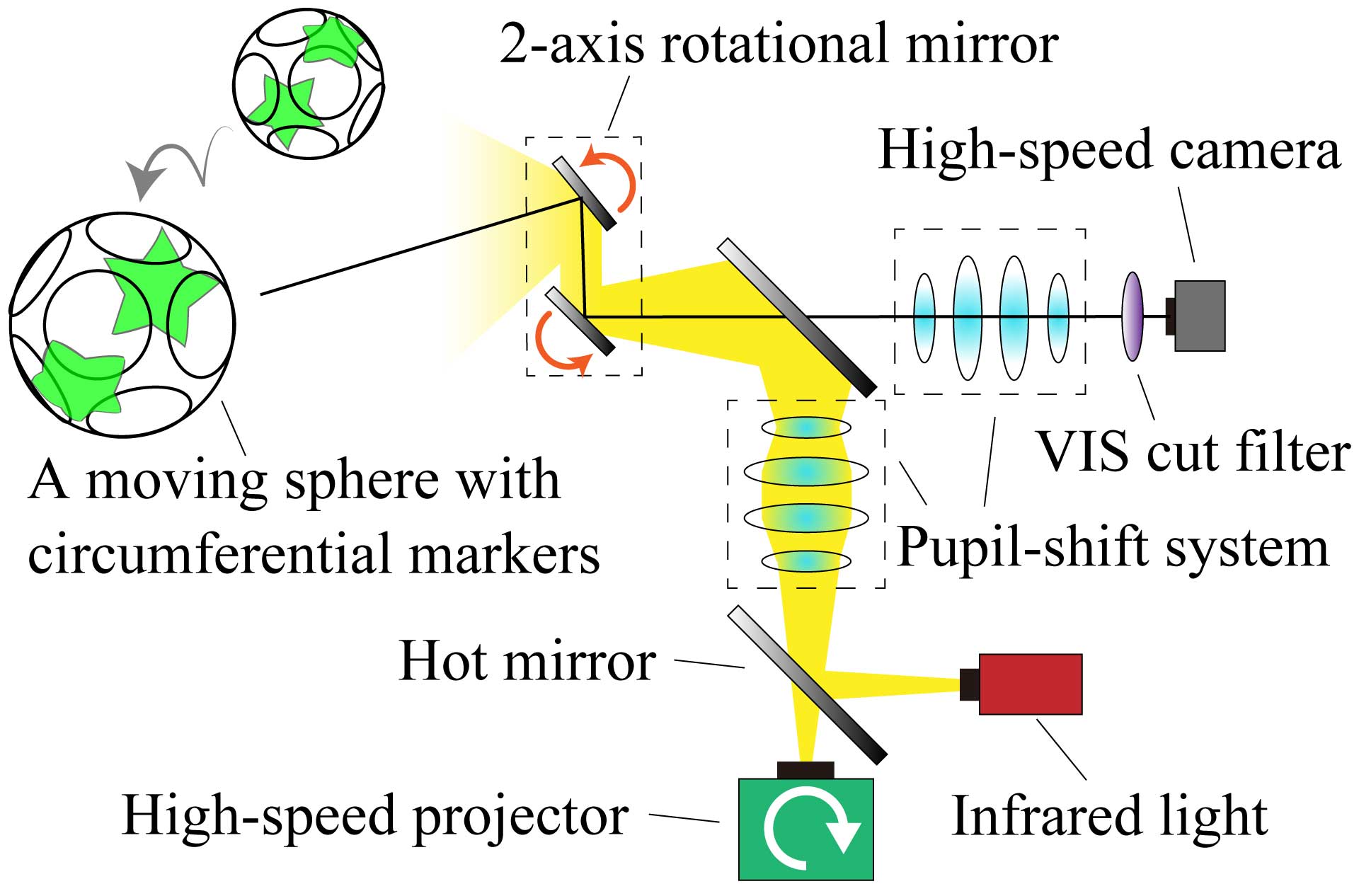 |
| Fig.1 Uniform circumferential markers (UCM) arranged on a sphere. | Fig.2 Schematic diagram of a 500 fps projection mapping system for a widely moving sphere with circumferential markers. |
 |
|
| Fig.3 (a) Playing catch with random occlusion by hands. (b) Real-time rotational expression using an arrow. (c) Texture projection whose speed is lower than that of the sphere itself, by which users can understand both texture and the sphere's speed. | |
References
- Yuri Mikawa, Tomohiro Sueishi, Yoshihiro Watanabe and Masatoshi Ishikawa: VarioLight: Hybrid Dynamic Projection Mapping Using High-speed Projector and Optical Axis Controller, SIGGRAPH Asia 2018 Emerging Technologies (p.17), Tokyo, Japan, 4-7 Dec. (2018)
- Yuri Mikawa, Tomohiro Sueishi, Yoshihiro Watanabe, and Masatoshi Ishikawa: Projection mapping system to a widely dynamic sphere with circumferential markers, IEEE International Conference on Multimedia and Expo (ICME2020) (London, 2020.07.09), pp. 1-6 [Acceptance rate: 14.6 %]